Extended an existing Deep Reinforcement Learning navigation framework to support the TurtleBot3 platform with realistic 2D LiDAR observations, and migrated the full system from ROS 1 to ROS 2.
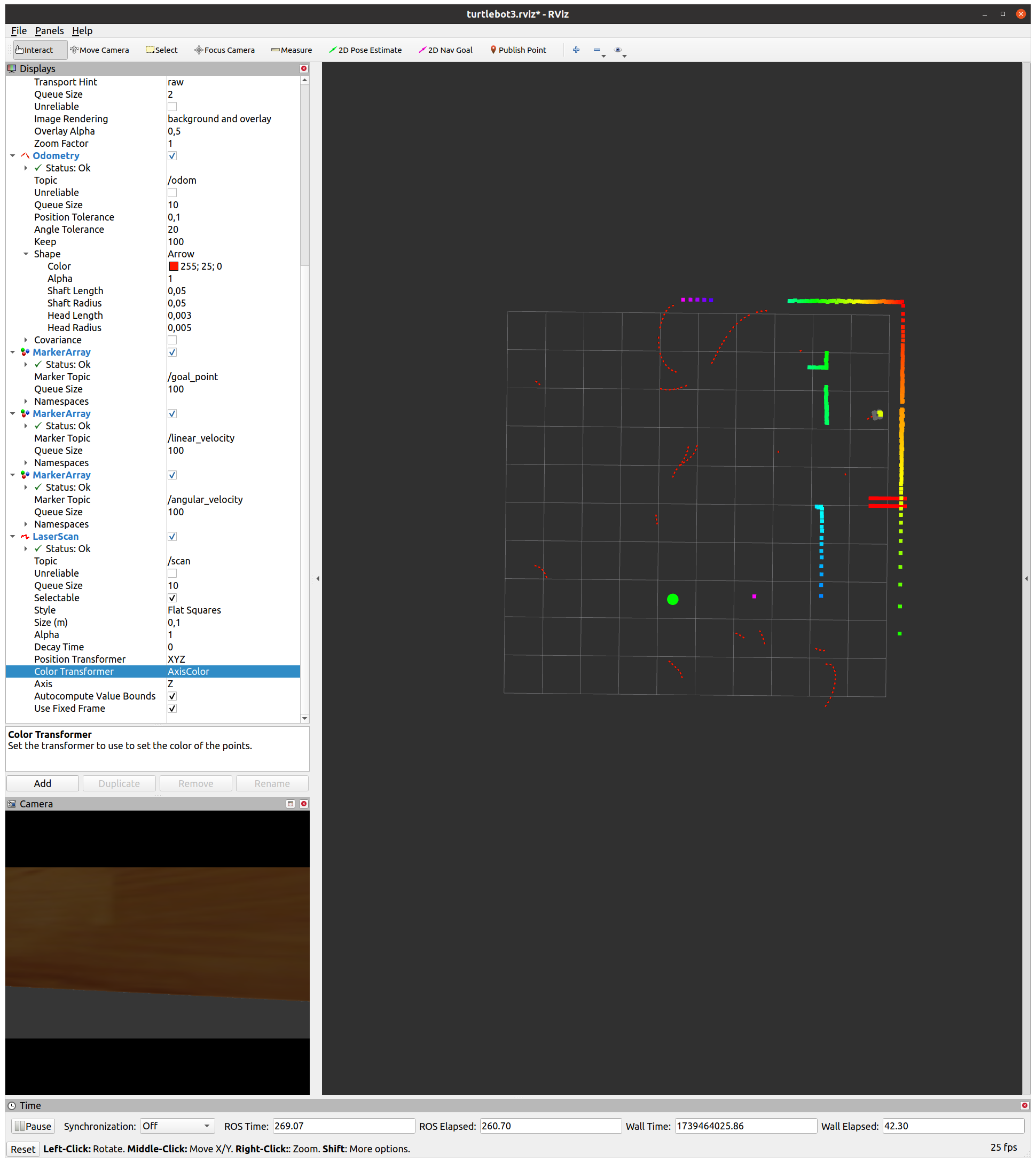
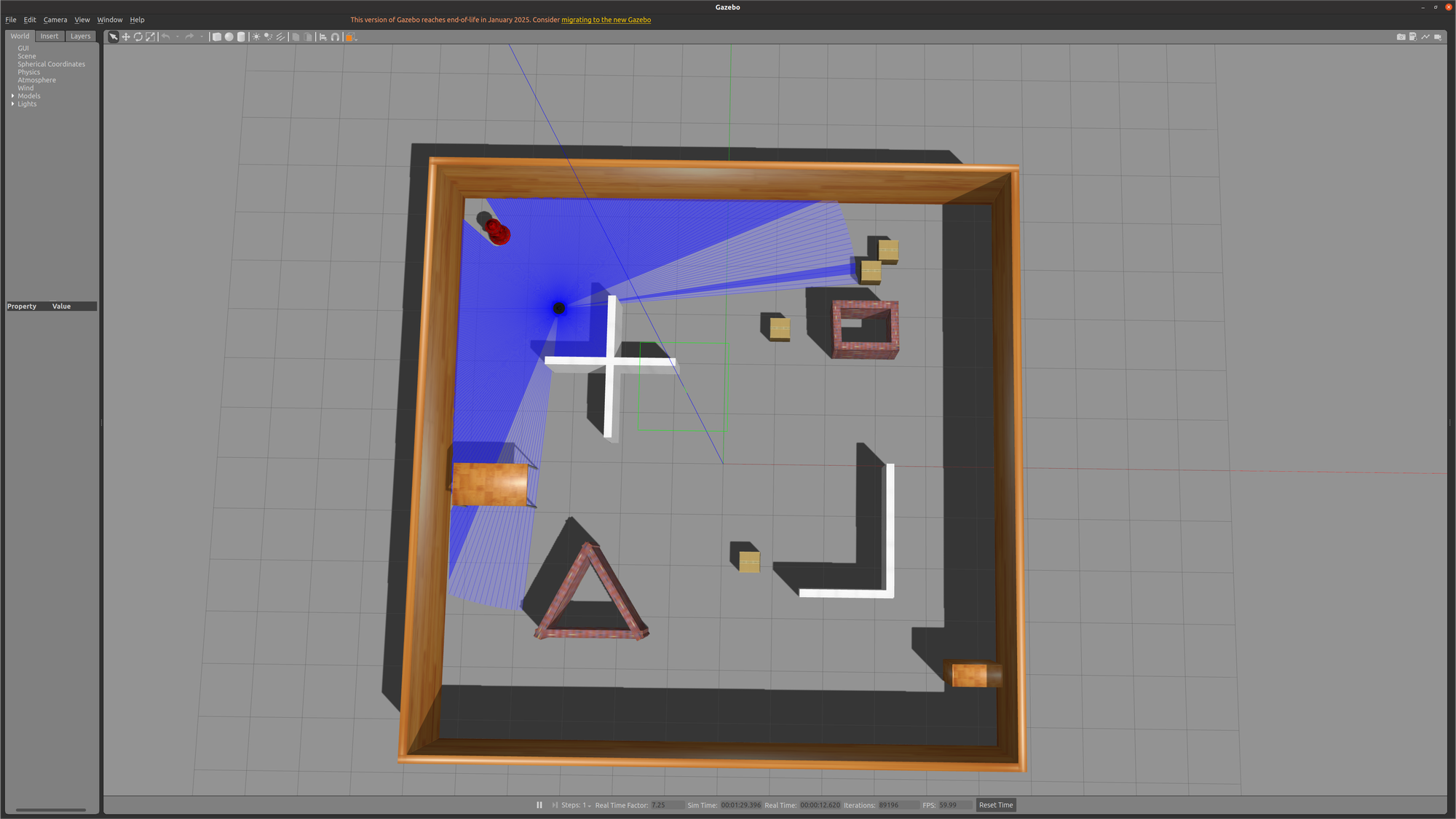
The project enables training DRL agents for goal-directed mobile robot navigation with obstacle avoidance in Gazebo, using LiDAR-based state representations and velocity-based control tailored to TurtleBot3 kinematics. To accelerate experimentation, the simulation can be executed at increased real-time factors while maintaining stable learning dynamics.
The result is a reproducible ROS 2–native pipeline for learning-based navigation that bridges the gap between simulation-focused DRL research and deployable mobile robot systems.

Resources
- Github repository: https://github.com/TannerGilbert/Turtlebot3-DRL-Navigation
- Worked based on: https://github.com/reiniscimurs/DRL-robot-navigation