Multiagent Simulation for Drones, Ground Robots & Fixed Wings with Gazebo
Testing autonomous systems in simulation before deploying them on real hardware is essential — especially when working with multiple vehicles that …
Robotics Researcher at ETH Zürich
I'm a Master's student in Robotics, Systems and Control at ETH Zürich. My research focuses on state estimation and autonomy for quadrotors, multi-agent drone systems, and reinforcement learning. I'm currently working on RL-based sign language interpretation with a humanoid robot.

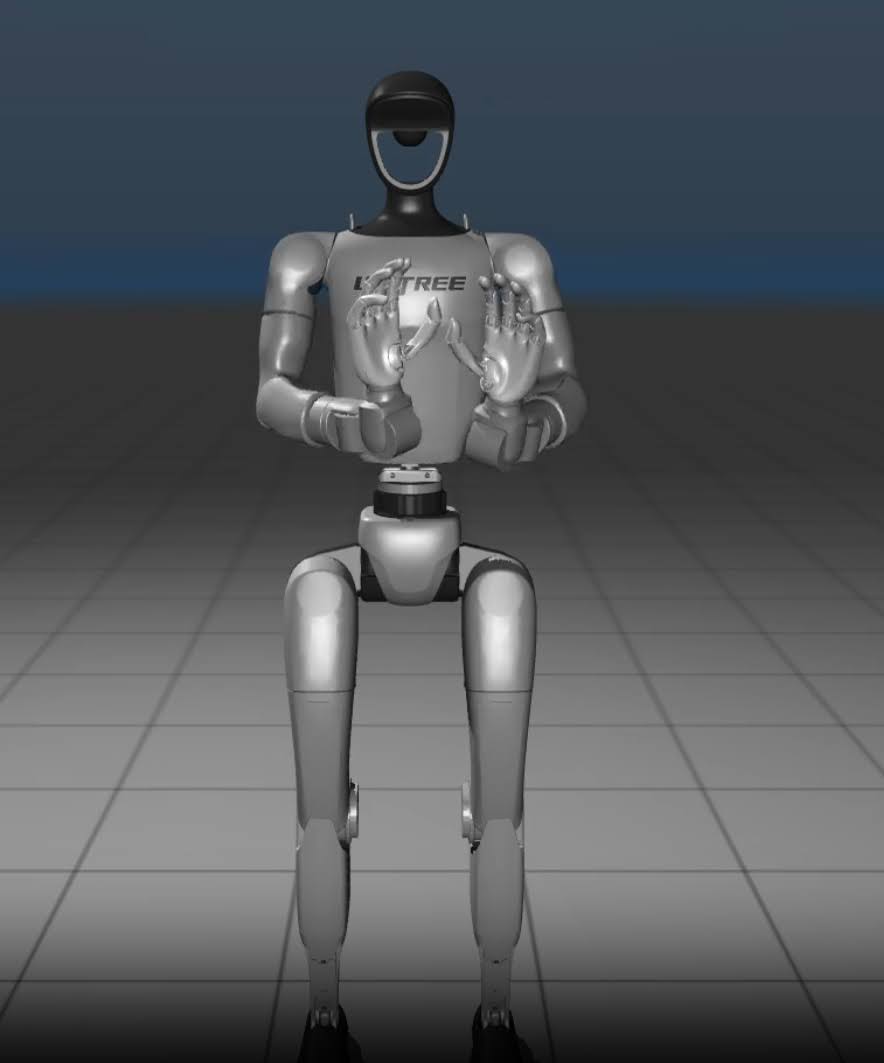
Building a pipeline that converts spoken language into continuous sign language motions for a humanoid robot.
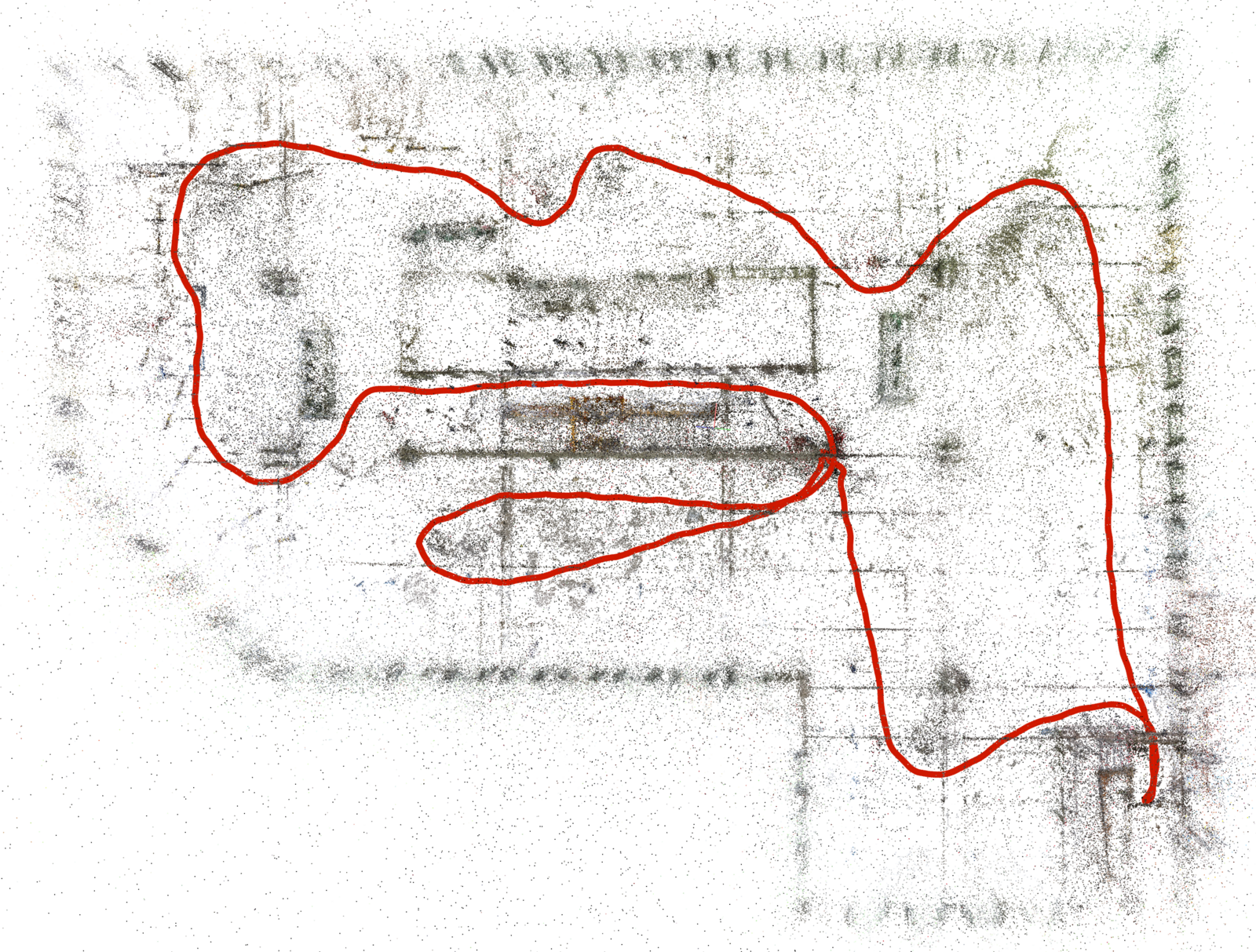
Hilti × Trimble SLAM Challenge 2026 entry built for the 3D Vision course at ETH Zürich — a metric, gravity-aligned, …
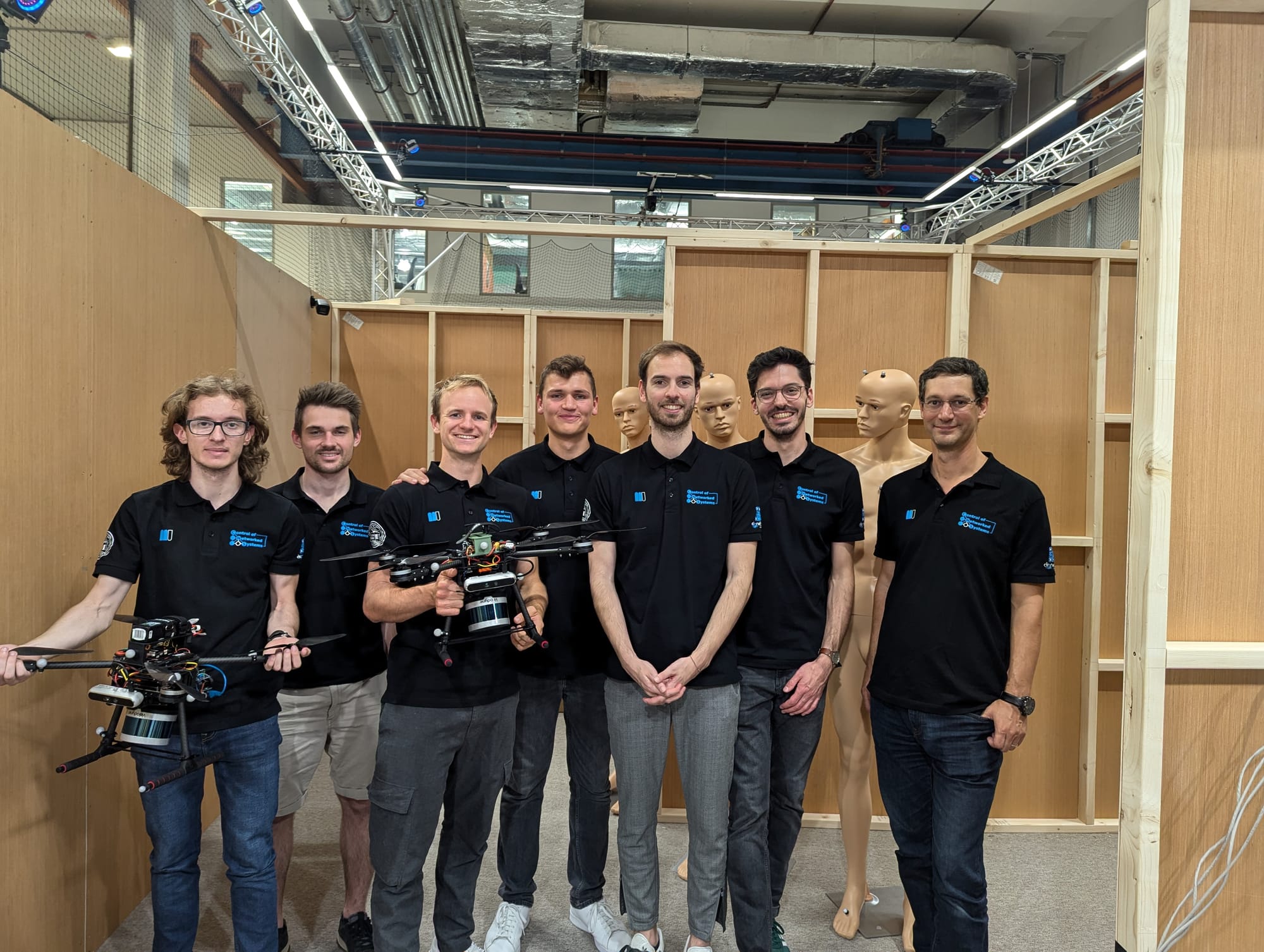
Through a series of collaborative competitions, the Sapience initiative fosters innovation in search and rescue …
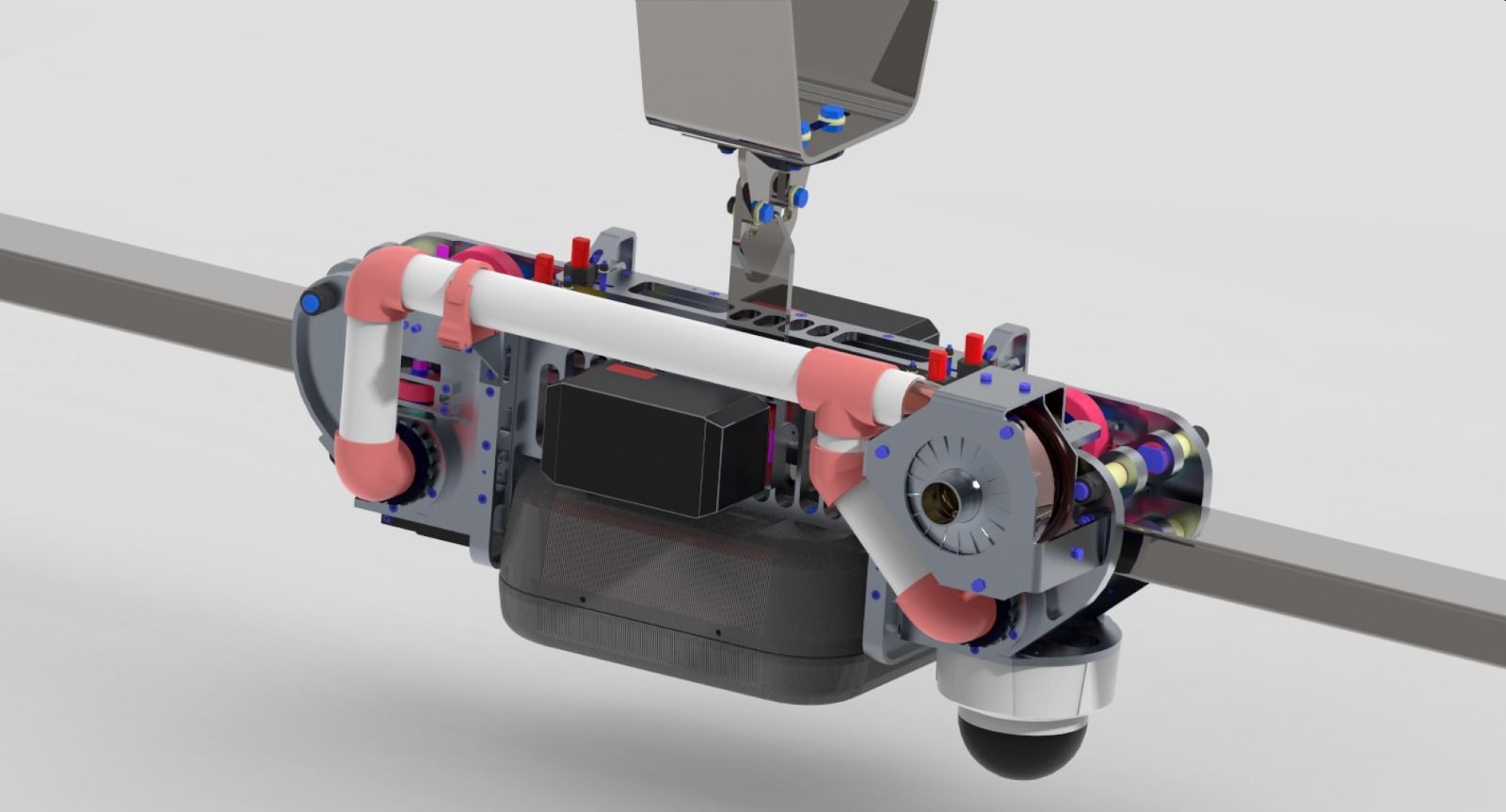
HASCY is a remote-controlled sled that drives on a rail that is mounted at the top of a tunnel. It is equipped with …
This project presents a multi-mission transformer robot capable of operating both as a ground …

This project implements real-time gesture classification using the uMyo EMG sensors. The system is designed to be …
COLMAP - Structure-from-Motion and Multi-View Stereo
[NeurIPS 2023] Official Code for "SMPLer-X: Scaling Up Expressive Human Pose and Shape Estimation"
Tools for ArduPilot ROS2 integration and testing on ROS 2 humble
COLMAP - Structure-from-Motion and Multi-View Stereo