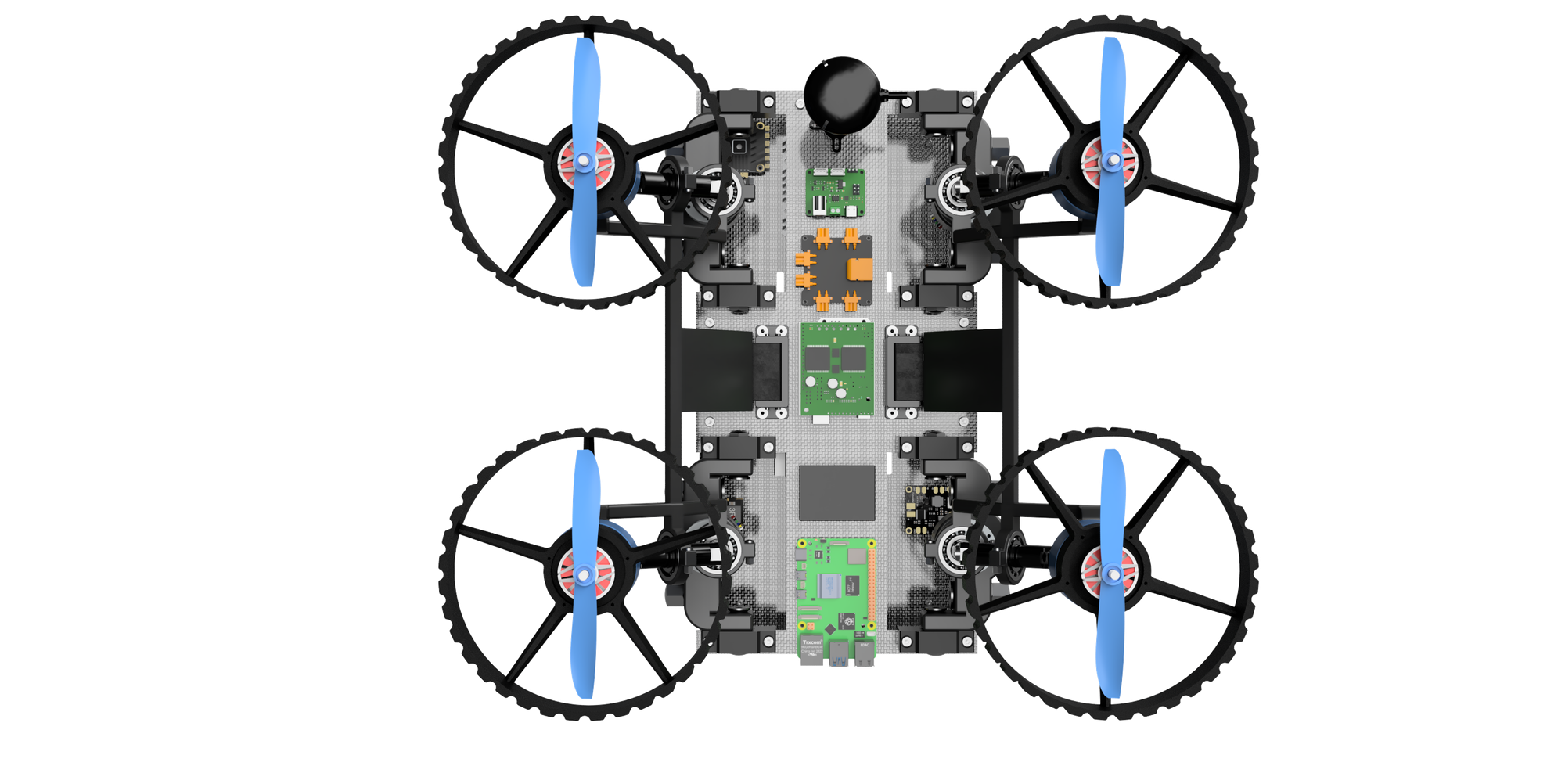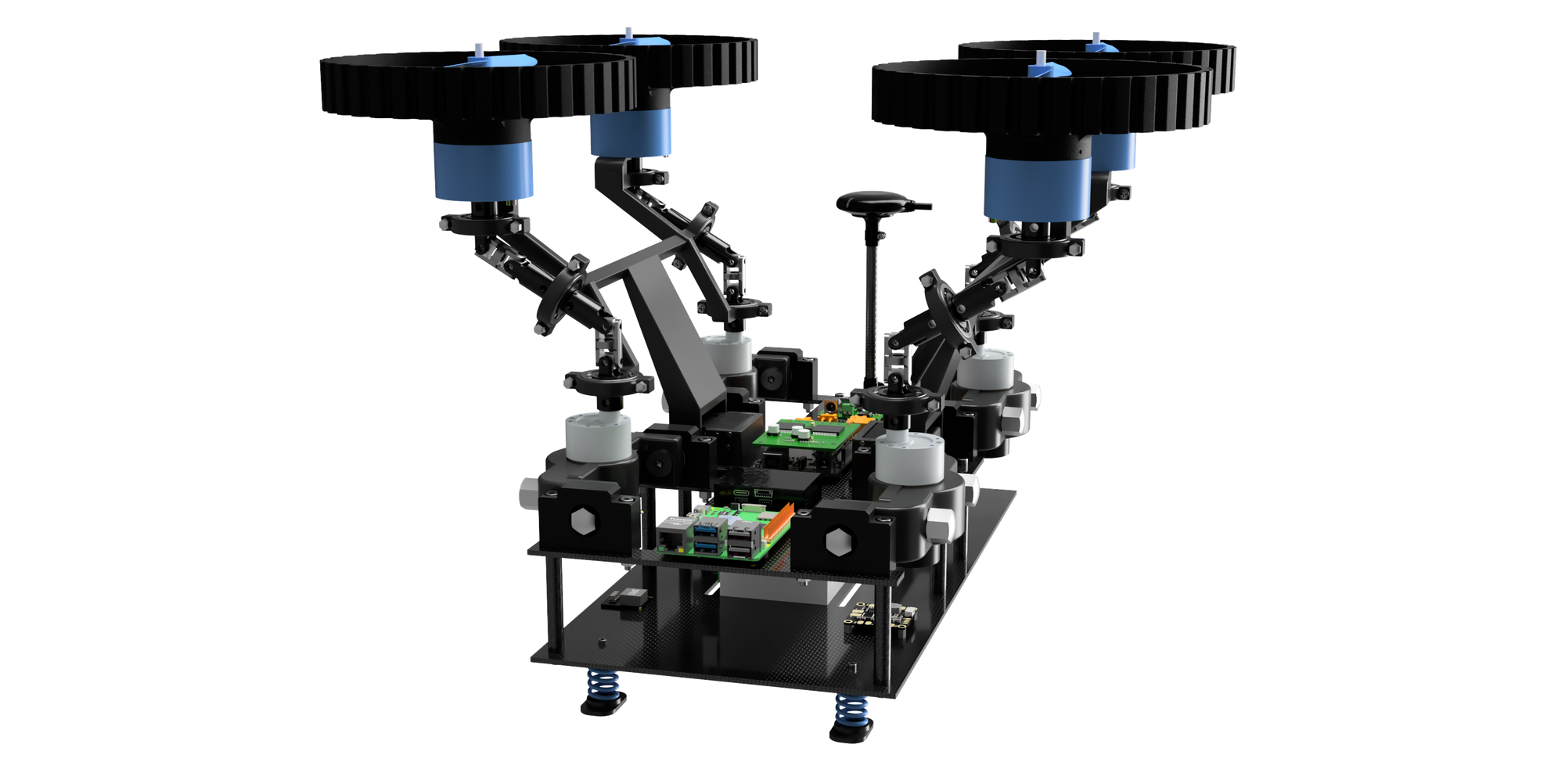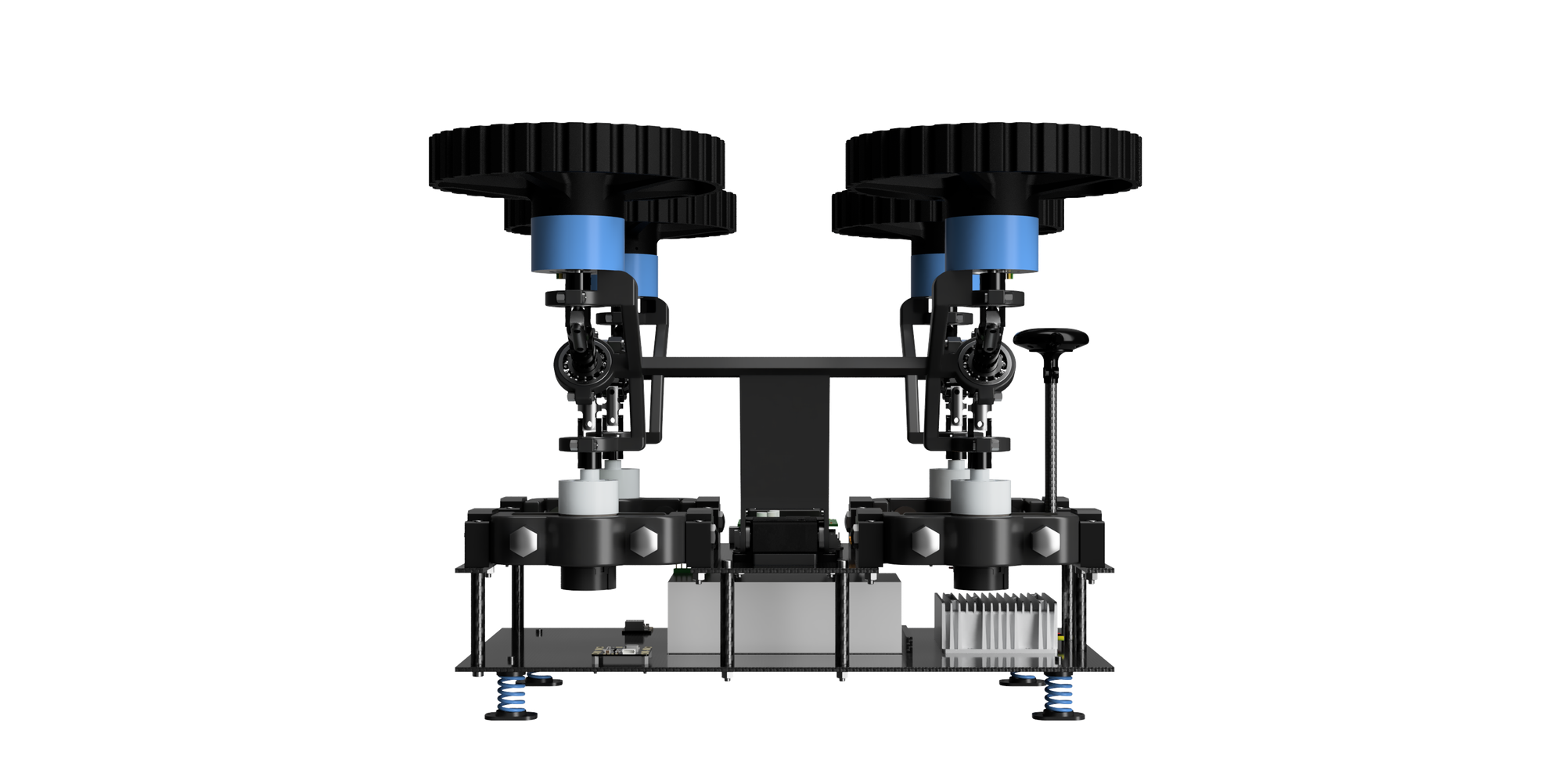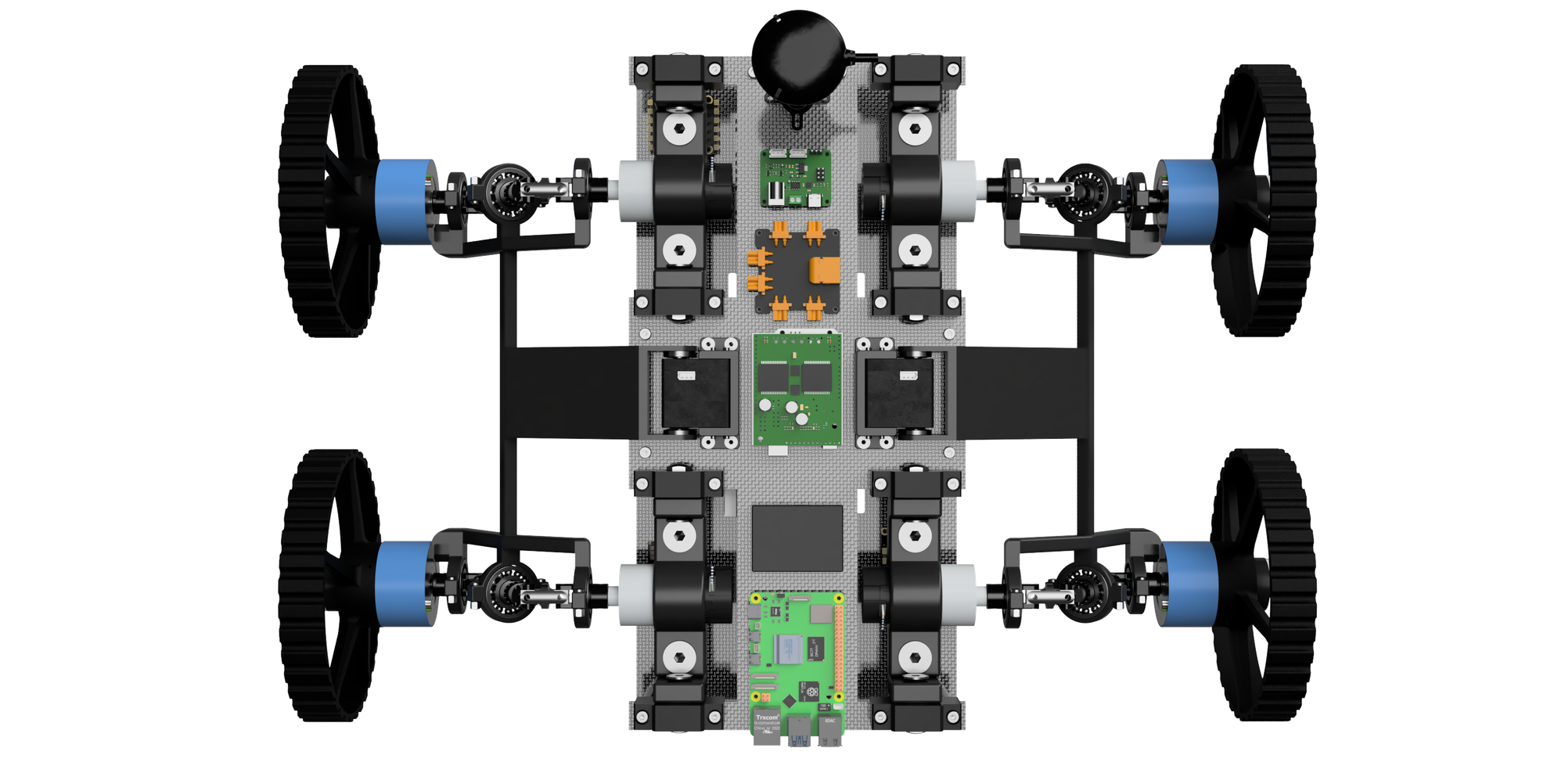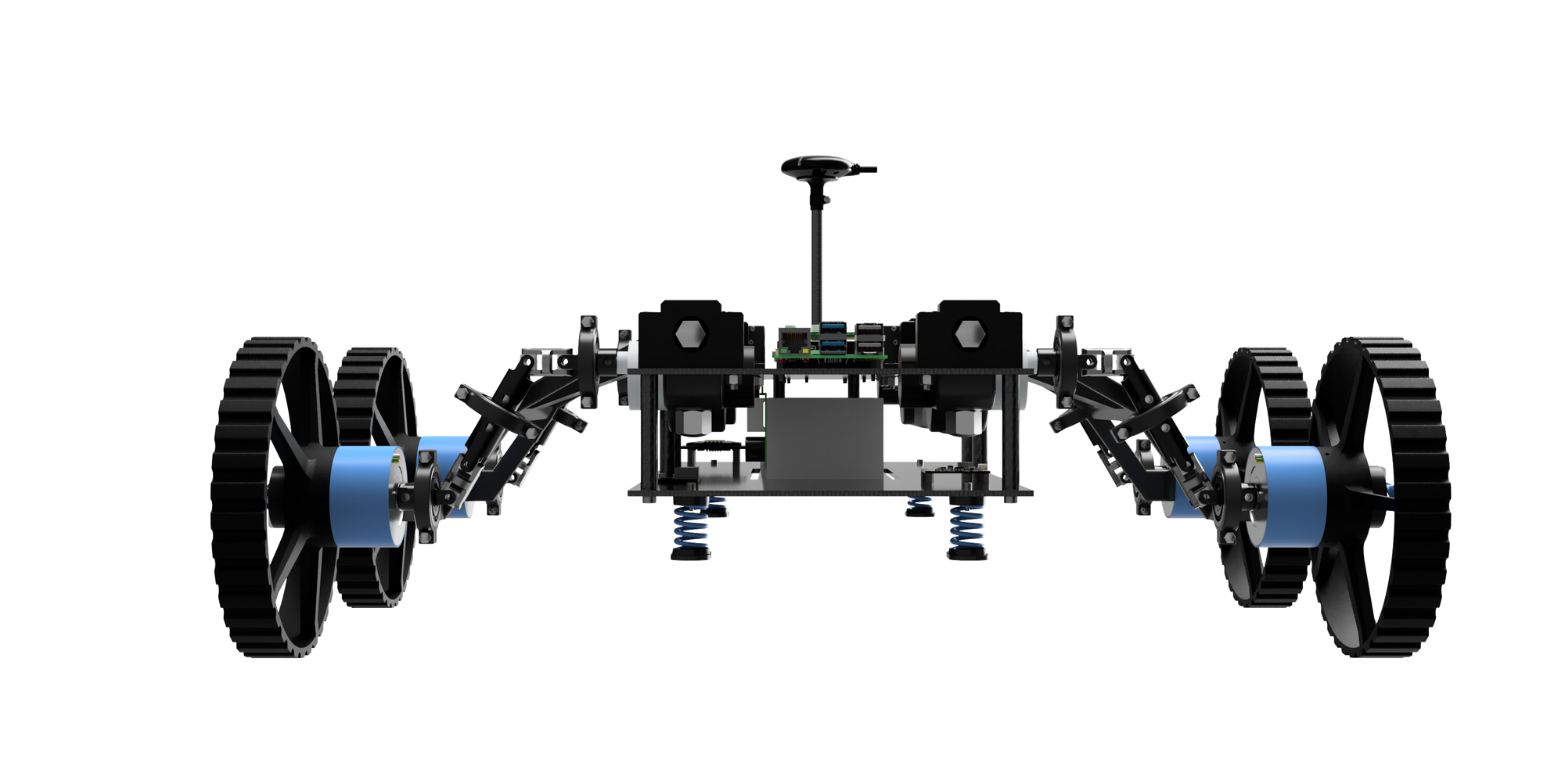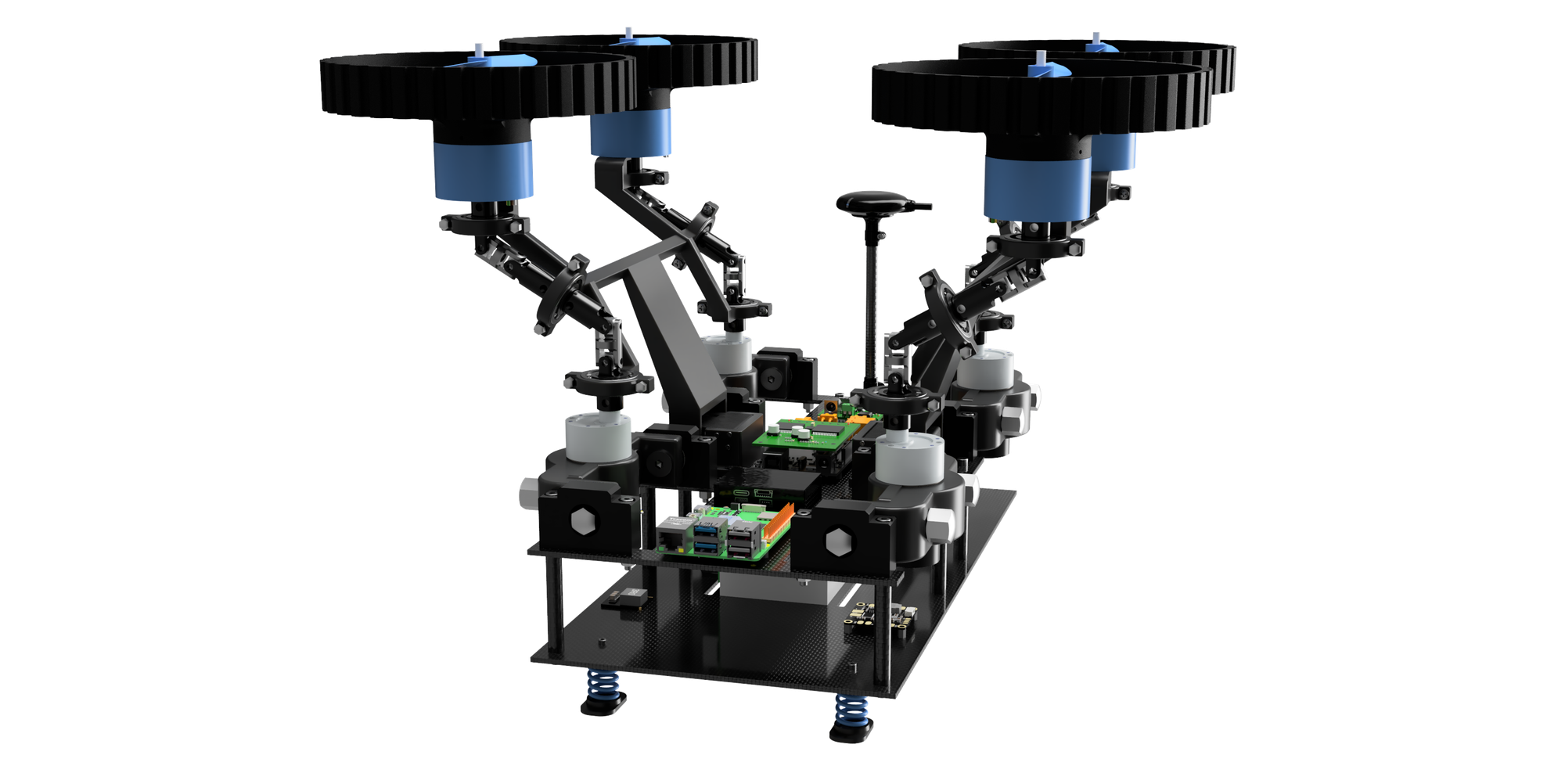
This project presents a multi-mission transformer robot capable of operating both as a ground vehicle and a quadrotor drone.
The design integrates constant-velocity (CV) joints, slip rings, and a servo-driven lifting mechanism to enable seamless transformation between driving and flying modes.
We also utilize the dual-use wheel-propeller system, where each wheel houses a brushless drone motor (BLDC) and propeller. This allows the same structure to serve as a rolling surface in ground mode and as an active rotor in drone mode, minimizing redundant components.
The project was implemented as part of the Basic Lab: Robot Design course (25S) at the University of Klagenfurt.
- Team: Nadezhda Varzonova, Gilbert Tanner, Marcel Lorber
- Repository: https://github.com/Incomprehensible/TransformerBot